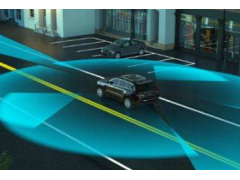
激光雷达技术可使用激光扫描并绘制出附近的环境,其高度敏感,能够精准地捕捉周围的环境,但缺点是视场角小,扫描范围有限。因此,Velodyne公司开发了一款激光雷达传感器,可通过每秒近一百次的旋转来解决这一问题,当然这个方案并不完美。
Velodyne的激光雷达传感器系统有许多活动的部位,将其安装到汽车后,汽车带来的震动会非常损耗传感器。而Braja的传感器系统,利用棱镜来折射激光雷达传感器的激光束,大大精简了传感器系统的结构。
一束光线投射到棱镜后,棱镜会反射出彩虹光谱,每种不同颜色的光线都有不同的频率,Baraja通过测量激光从棱镜反射出去的角度来定位周遭环境,当然,Baraja使用的光束不可见,属于红外线区域的光。
虽然Baraja开发的传感系统非常简洁,但是能够大大节省成本,制作出更简洁更牢固的激光雷达传感器,这样便可以大幅降低无人驾驶汽车的传感器硬件成本。