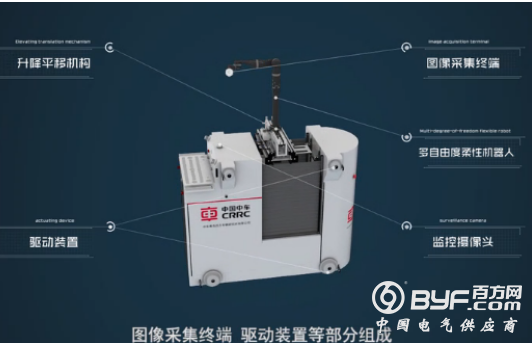
轨道车辆智能检修系统是由中车青岛四方车辆研究所有限公司(中车四方所)研制。该系统包括控制中心和图像采集机器人两大部分,控制中心收集整理采集的图像、调度整个检查工作过程;图像采集机器人采集列车各部位的检测信息,它主要由智能运载平台、多自由度柔性机器手臂、相机、传感器,监控摄像头等部分组成。
该系统是世界上第一台利用高度柔性机器人与机器视觉融合技术,完全按照高速列车检修标准或城市轨道列车检测标准,实现车辆各部位视觉检查作业的设备。
当列车入库进行检修时,启动图像采集机器人进行自检,机器人匀速前行到达车头位置时,机器人自动对车辆底部进行图像检测,采集车底图片;当机器人到达车尾定点位置后,机器人伸出机器手臂并逆向行驶,机器人发出的激光定位到转向架位置后,机械臂按照预定设计进入转向架和车辆底部的狭窄空间,开始采集列车关键部位图片,同时在机械手臂随着机器人前行采集图片时,机器人自动开启面阵相机,进行更为详实的底部高清拍摄。该智能检修系统相比于传统人工作业,可增加40%以上的检修范围,降低漏检率,提高检修效率。列车采集信息会实时显示在控制中心显示器上,采集完成后,机器人自动回复至初始位置并关机。
古话说“人有三宝,精气神”,该系统也有三大法宝,确保检查工作的高效、高质,即高清图像采集清晰,故障识别处理准确和多种驱动模式兼容。
高清图像采集清晰。图像采集机器人可以采集转向架各个方向上关键部位的高清图像,多自由度柔性机械臂携带图像采集装置采集转向架顶部、侧面和底部高清图像,同时线扫相机采集整个车体底部高清图像,面阵相机采集转向架底部高清图像,确保全面覆盖车辆待检查区域。
故障识别处理准确。通过采用先进的图像特征识别技术和机器深度学习技术,极大的提高故障识别准确度。采集到的高清图像通过无线网络实时传输到控制中心,并利用图像识别算法对图像进行自动故障判断,例如部件丢失、螺栓松动、异物、断裂、尺寸磨耗等,系统能及时将信息自动反馈给检修人员进行核实。
多种驱动模式兼容。图像采集机器人根据检修作业不同条件,可采用挂式或在地面铺设钢轨两种方式进行工作,兼容多种工况需求,还可以根据用户需求,量身定制检修模式。