长沙理工大学电气与信息工程学院、国网湖南省电力公司常德供电分公司、国网江苏省电力公司苏州供电分公司苏、国网湖南省电力公司岳阳供电分公司的研究人员周腊吾、杨彬佑、韩兵、李飞龙、胡舟,在2019年第17期《电工技术学报》上撰文,提出一种漂浮式风机(FOWT)气-水动力耦合下基于径向基函数神经网络(RBFNN)的独立变桨控制方法。
首先,考虑风剪切效应和塔影效应,建立更精确的气动模型,将气动模型与水动模型耦合,得到风浪流扰动下的相对风速。在此基础上,采用径向基函数(RBF)神经网络逼近变桨控制系统未知的非线性函数,通过Lyapunov方法导出自适应率,在线调整神经网络权值来改善所提出的独立变桨控制系统的动态性能。
在FAST-Matlab/Simulink联合仿真的基础上,将该文所提控制方法和传统PI控制方法进行对比结果表明,该文所提方法能够更有效地实现FOWT输出功率的稳定,并在一定程度上减小了漂浮基础的载荷波动和俯仰振荡。

我国风电发展迅速,截至2017年,我国已成为世界上累计风电装机容量和新装机容量均最大的国家。根据国家气候中心的调研结果,模拟我国离岸50 km范围内近海风能资源,得出理论技术可开发量为7.58亿kW。同时,深海风电场既不影响海边景观及海上航道的通畅,其运行发出的噪声也不影响居民生活,且拥有更强更稳定的风源。因此,漂浮式风机(Floating Offshore Wind Turbine,FOWT)必然成为未来风电行业拓展的方向。
目前,在对海上浮式风机进行气动力分析的过程中,主要借鉴传统固定式风机气动力分析的理论方法,如叶素动量理论、势流理论、致动线模型以及计算流体动力学(Computational Fluid Dynamics, CFD)方法等。
可见目前大部分针对FOWT的动力学建模都存在建模不精确的问题,因此,应用于FOWT上的变桨控制方法研究也很少。
实际工况中,由于风剪切效应和塔影效应,使风轮平面所受载荷不平衡,这种不平衡载荷对工作于深海的漂浮式风机尤甚。而目前大部分漂浮式风机建模的研究均未考虑这一点,且忽略风机塔架的柔性,直接将整个风机视为刚体,导致系统建模不精确。
本文在已有气-水动力耦合模型的基础上,考虑风剪切效应、塔影效应和塔架的刚度特性,建立更精确的气动载荷模型,并采用径向基函数神经网络(Radical-Basis Function Neural Network,RBFNN)构建独立变桨控制方法。以NREL-5MW风机和Spar式OC3-Hywind基础组成的FOWT为仿真模型,对比传统PI控制方法和本文所提控制方法,结果表明,本文所提控制方法可更有效地稳定输出功率,并在一定程度上减小漂浮基础的载荷波动和俯仰振荡。

图1 FOWT基础六自由度模型
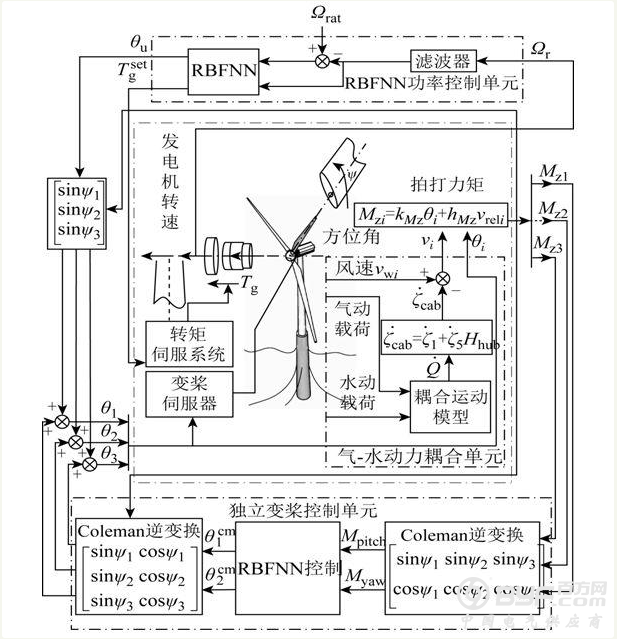
图2 基于RBFNN的独立变桨控制系统原理框图
本文针对FOWT建模不精确的问题,在已有动力学模型的基础上,考虑风剪切效应、塔影效应以及风机塔架的刚度,建立了更精确的气动模型,将改进后的气动模型与水动模型耦合,建立漂浮式基础受气-水动力影响下的时域耦合运动方程,进而求得受波浪扰动和风速影响的相对风速。在此基础上,采用RBFNN算法构建漂浮式风机的独立变桨控制系统。
在FAST-Matlab/Simulink下进行联合仿真,将所提控制方法和传统PI控制方法进行对比。结果表明,本文所提控制方法可以有效实现漂浮式风机的输出功率稳定,并在一定程度上抑制了风机的纵摇运动,减小了基础俯仰载荷。