目前,机器人研究面临的主要挑战是如何开发出能量自给的完全自主机器人,并达到高效的能量效率,应用于恶劣、污染环境作业。

“能吃能拉”的能量自主机器人
近日,布里斯托尔大学(University of Bristol)研究人员开发出一款具有软体驱动器“嘴巴”和“人工胃”的能量自主水上机器人,能够吸入周围环境中的生物质、消化食物并吸收能量——也即“能吃能拉”的能量自主机器人。
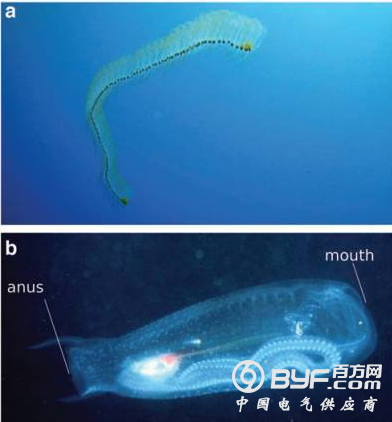
(a)一长串大约200只樽海鞘;(b)单只樽海鞘。
实际上,该机器人是一款模拟海洋无脊椎管状动物樽海鞘(salps)的仿生机器人。樽海鞘的躯体有两个开口,分别用于进食和排泄。樽海鞘通过消化穿过躯体的任何食物并吸收能量来维持其游动,同样的,布里斯托尔大学研究团队也正是利用该能量过程。
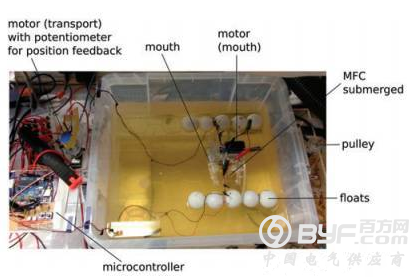
该能量自主机器人的“嘴巴”由柔性聚合物薄膜制成,通过柔性膜的开闭吸入一肚子的“液体食物”;而“人工胃”则是由微生物燃料电池(MFC)制成,液体食物中微生物群在这里代谢、分解有机物而将化学能转化为电能,为机器人本体下一次进食行为供能;最后,消化后的废物从机器人后端排出,并进行下一次进食行为。

MFC原理示意图。有机物质在阳极发生氧化反应,氢阳离子在阴极发生还原反应,从而形成有效电势差以及负载电流。
目前,MFC作为能量转换单元的效率实际上还是很低的。为此,研究者将该机器人的“嘴巴”设计成软体材料,以减少能量消耗;此外,研究者利用多个MFC形成一系列能量转换单元,就像电池串联一样。
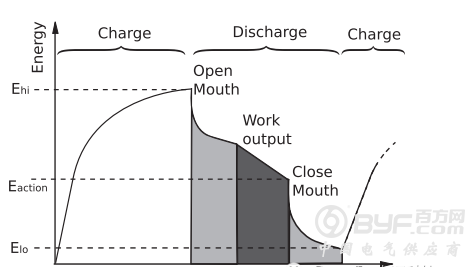
机器人“进食行为”周期:充电和放电。充电:机器人不断进食,直到能量达到能量阈值Ehi;放电:浅灰色区域代表机器人自身运作消耗能量,深灰色代表能够用于有用作业任务的净能量。
并且,研究者为该机器人设置了储能器,每一次消化食物都会储存能量(充电),并用于下一次进食(放电)。理论上来讲,该机器人可以无限循环工作。
剑桥大学机器人研究专家藤井郁弥·饭田(Fumiya Iida)说:“最大的突破是该机器人能够通过吸收能量实现自给自足。”
自主机器人的一大优势是其本身基本不需要人工干预,比如外加电源、换电池、充电等。所以,自主机器人十分适合恶劣环境作业,比如放射性灾区、严重污染的湖水区。
目前,研究者的机器人模型只是做了概念论证性实验:环境液体是理想化设计的,营养物质富余并易于摄取等等。但研究者相信,该能量自主机器人能够在更加挑战性的环境中运作。

能量自主机器人有望用于海洋“赤潮”处理以及垃圾清理等
布里斯托大学的研究者汉莫·菲拉摩尔(HemmaPhilamore)称:“未来,像这种能量自主的机器人,有望用于海洋垃圾清理作业或者农业作物监测等。我们发明自主机器人的目的是投入实用,真真正正地用于自然环境中。”